

- Ամփոփում
- Առաջարկվող արտադրանքներ
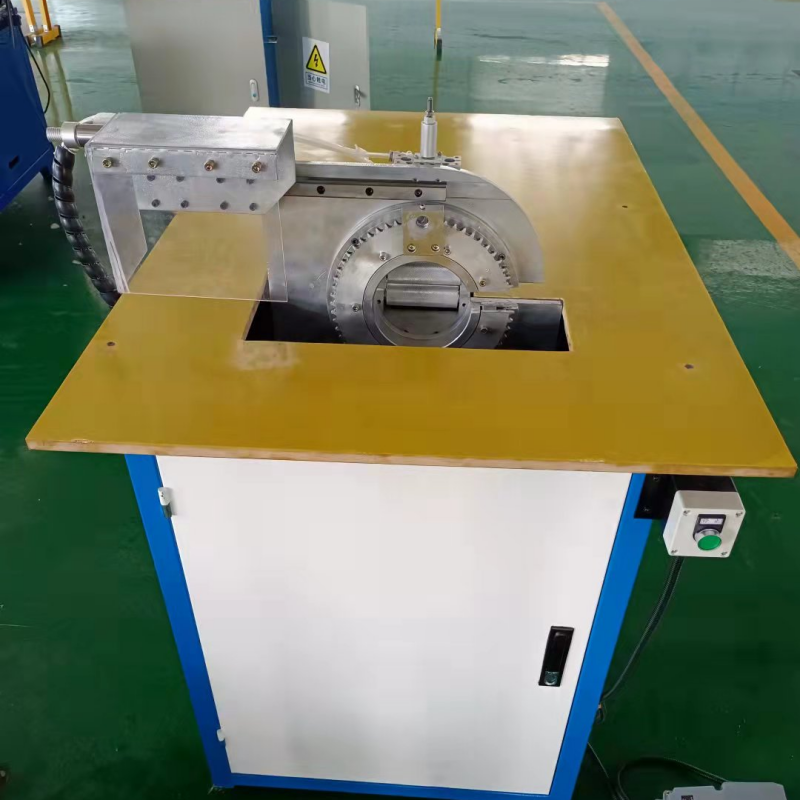
Այս մոդելի ժապավենի շրջապատման մեքենան իրականում օգտագործվում է շարժիչի ստատորի մագնիսական դաշտի սարքավորումների մեկուսիչ ժապավենով ինքնաշխատ շրջապատման համար: Աշխատանքային ընթացակարգը հետևյալն է. առաջին հերթին՝ ստատորի սարքավորման վրա ձեռքով նախնական շրջապատել ժապավենը 2–3 պտույտով, այնուհետև հորիզոնական դիրքով տեղադրել այն ժապավենի ինքնաշխատ շրջապատման շարժաբարձակի մեջ. սեղմել ոտքով մեքենայի միացման սարքը, և ժապավենը ինքնաշխատ կշրջապատի շարժաբարձակը. երբ հասնի նախատեսված պտույտների քանակին, հետագա ժապավենը կշրջապատի ստատորի սարքավորումները. շարունակել սեղմել հակառակ սարքը, մինչև ամբողջ ստատորը շրջապատվի: Այս մեքենան օգտագործում է շարժիչ՝ շարժաբարձակի պտտման համար, իսկ արագությունը կարելի է կարգավորել արագաչափով՝ միջին սեղմվող միկայի ժապավենի և ցածր սեղմվող միկայի ժապավենի օգտագործման համար:
1. Միկայի ժապավեն՝ միջին 100 × միջին 39
2. Առավելագույն հատված՝ 15 × 60 մմ², ե
3. Ուղիղ երկարություն՝ 400–2000 մմ, անընդհատ կարգավորելի։ Ե
4. Մեխանիկական հաստատուն ընդլայնման ուժի կարգավորման շրջանակ՝ 1–6 կգ
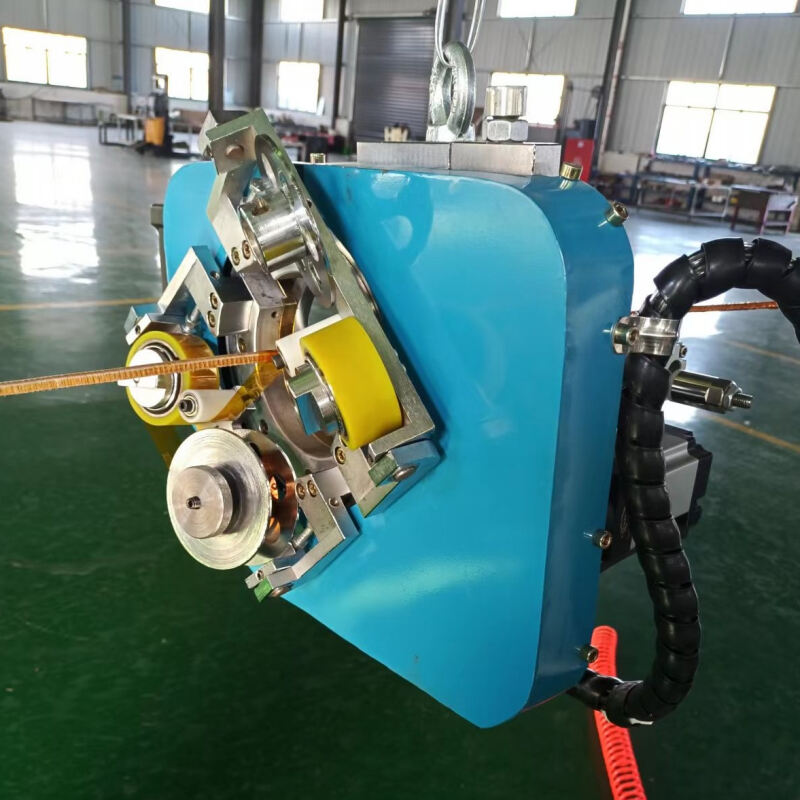
5. Օդային բռնակի ռոլիկը բռնակում է սալիկը՝ ապահովելով շարվածքի արագություն և սալիկի նվազագույն բացվածք 210 մմ։
6. Պատելու արագություն՝ 0–220 обор/րոպե (փոքր տեսականուն օգտագործման դեպքում հարմարավետ արագությունը՝ 100–150 обор/րոպե), թեքումների ժամանակ կիսով չափ նվազում է։
Առավելագույն ծռման անկյունը 70° է, իսկ ծուռ մասի մեկ գլխի առավելագույն ներդարձային երկարությունը՝ 220 մմ։ Կարող է ծածկել ինչպես փոքր, այնպես էլ մեծ ծռումներ։ ←
7. Տեսակավորման մեքենայի երկարությունը, բարձրությունը և անկյունը կարգավորելի են։
8. Այս սարքը նախատեսված է մեկ սպեցիֆիկացիայի մեծ ծավալով արտադրության համար։ Հաճախակի և փոքր սերիայի սպեցիֆիկացիայի կարգավորումները կարող են նվազեցնել սարքի արդյունավետությունը։ ←
9. Օդի ճնշում՝ 0,6 ՄՊա, շրջակա միջավայրի ջերմաստիճան՝ –5–40 °C, հարաբերական խոնավություն՝ 0–85 %։ ←
10. Սալիկի ամրացման օղակը ամրացվում է անկյունագծով՝ բռնակման շարժիչով
11. Բարձրության ճշգրտում՝ դանդաղեցնող մոտորի երկու ծայրերը բարձրացնում են
12. Սալվերի փաթաթման անկյան ճշգրտում՝ երկու ծայրերում տեղադրված սերվոմոտորները համատեղ են աշխատում
 |
 |